通信教程
| 版本 | 日期 | 人员 | 修改记录 |
|---|---|---|---|
| v1.2 | 2023-01-04 | 郑桂勇, 2712089295@qq.com | 修复部分格式问题,以及串口部分的问题 |
| v1.1 | 2023-01-03 | 池威律, 694621753@qq.com | 修复部分错误 |
| v1.0 | 2023-12-15 | 池威律, 694621753@qq.com | 增加通信部分文档 |
1.CAN
学习IRobot战队视觉组自瞄代码通信部分
通信部分在自瞄仓库的如下目录下
1
2
src/Algorithm/src/Transporter/can/can.cpp
src/rmos_transporter/src/can_comm_node.cpp
学会用命令行或脚本使能can
1
2
3
4
5
6
7
sudo ip link set can0 type can bitrate 1000000
sudo ifconfig can0 up
# or
echo "nuc" | sudo -S ip link set can0 type can bitrate 1000000
echo "nuc" | sudo -S ifconfig can0 up
学会在命令行使用candump can0来查看can线上的数据
安装在 Linux 上 SocketCAN 命令行调试工具:
1
2
3
4
sudo apt install can-utils
sudo ip link set can0 up type can bitrate 1000000
# 查看can0线上的数据
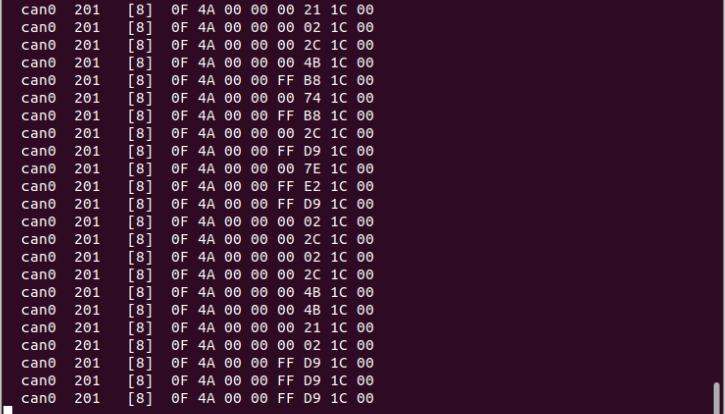
candump can0
1
2
3
其中201为ID,在用户手册内或src/Algorithm/include/Transporter/can/can.hpp内定义
[8]右侧为该帧的信息
注意can通信一帧最多只能发送8个字节(byte),不要尝试在一帧can内发送多于8个字节的数据!!!
若can0上有多个ID的信息,则可使用以下命令只显示特定ID
1
candump can0 | grep 201
若有两路can则命令行对应改为
1
candump can1
如果要更深入学习can通信的原理自行搜索socket编程
2.串口(待补充)
2022赛季自瞄通信由串口通信改为can通信,2023赛季队内只有雷达使用串口通信,若感兴趣请提前自行搜索
3.usb通信
一帧usb通信可以发送无限字节的消息,后续可以考虑自瞄使用usb通信代替can通信(这有利于信息同步性)。
依赖及其构建
- usb通信依赖libusb,其安装可以参考博客
赋权usb
1
lsusb
找到stm32 usb虚拟串口,假设为
1
Bus 003 Device 009: ID 0483:5740 STMicroelectronics Virtual COM Port
一般Bus id不会改变,而Device id在每次重新插入后都会发生变化,所以一般这样赋权此usb端口
1
sudo chmod 777 /dev/bus/usb/003/*
学习usb通信nuc端代码
视控一体使用usb通信从c版读取裁判系统数据和imu数据(视控一体仓库)
1
2
src/skider_hw/sdk/include/usbcdc_transporter.hpp
src/skider_hw/sdk/src/usbcdc_transporter.cpp
This post is licensed under CC BY 4.0 by the author.